Challenge:
Slugs are a serious pest in agricultural and horticultural crops and are particularly damaging in temperate climates. A study by the AHDB concluded that failure to control slugs could cost the UK agricultural industry more than £100M per year. Current control strategies mostly rely on chemical molluscicide pellets, containing either metaldehyde or iron (ferric) phosphate. However, there have been concerns over the use of metaldehyde due to its impact on non-target organisms and water systems, resulting in its subsequent ban in the UK. Therefore, with this ever-limiting toolbox, there is a need to move towards more environmentally benign slug control measures. One such method is the use of nematode Phasmarhabditis hermaphrodita, and more recently, a second nematode-based product for slug control has been launched based on Phasmarhabditis californica. However, cost prohibits their use in broadacre, limiting their market to high value crops. If these products were applied directly on or near the slug through enhanced monitoring of slug distribution, could this open up a new market for biological products?
Background:
CHAP’s very own ‘slug queen’, Dr Jenna Ross OBE, secured a Nuffield Farming Scholarship in 2018 to travel and look at the future of slug control. During this time, she identified a huge gap in the market to improve slug monitoring and enhance the mainstream use of biological control agents for slugs. She saw that many farmers were not partaking in traditional slug monitoring and trapping, and were instead opting for blanket application of synthetic molluscicides, such as metaldehyde. Jenna realised that technology could play an important role in understanding the distribution of slugs, thus allowing for more informed decision making and a targeted approach to slug control.
An advocate of biological control, Jenna spent much of her research career identifying new nematode isolates for commercial development as bio-molluscicides. Her thinking was, knowing where the slugs are in the field through improved monitoring, could unlock the ability to precisely apply biologicals, thus reducing their cost and opening up a whole new market.
This snowballed into SlugBot, a ground-breaking research project utilising a wide range of expertise including malacology, nematology, biological control, crop protection, machine learning, AI, multispectral imaging and spraying technology. By bringing a multidisciplinary approach, the ‘dream team’ for autonomous pest monitoring and control was created.
Three phase approach:
Phase one: Collection, imaging and artificial intelligence
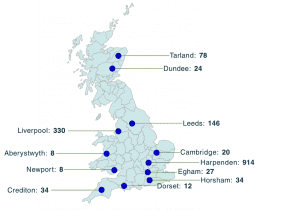
The project began in the height of the first COVID lockdown, meaning slug collection became hugely difficult due to travel restrictions. To overcome this, a citizen science project was launched whereby families were encouraged to collect and send in slugs from all over the UK. A series of online videos were made through the platform ’Eat Farm Now’ under the #LockdownLearning campaign, demonstrating how to collect and identify slugs. Slugs were then sent to the CHAP team at the Digital Phenotyping Lab, who worked alongside Rothamsted Research scientist, Dr Tom Ashfield, to image the slugs.
Phase two: Trialing slug mapping capabilities in glasshouse and field conditions.
The next phase of the project was to test the AI model developed in phase 1, in both glasshouse and field conditions.
Phase three: Developing precision spraying capabilities of the robot and trialing using a biological control agent
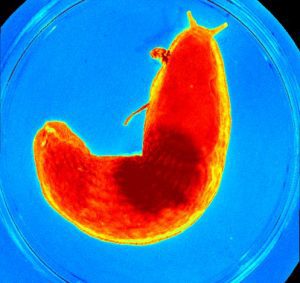
Simultaneous to phases 1 and 2, the project needed to develop the spraying capabilities of the robot. This meant not only looking at different nozzles, spraying pressure and flow rate, but also matching up the mapping capability. Due to Jenna’s passion for biological control, the system was trialed with a nematode-based bio-molluscicide. The nematodes, once applied, actively search out slug hosts and enter via natural openings, causing a characteristic swelling of the mantel of the slug, and reducing feeding. Death of the slug host usually follows four to 21 days after infection. Once the cadavar food source is depleted, the nematodes return to the soil to search out their next slug host. The aim was to apply these nematodes as precisely as possible, to keep the costs as low as practicable for farms and for the SRC equipment.
Findings:
Phase one: Collection, imaging and artificial intelligence.
A total of 1635 slugs from across the UK were collected, represeting 12 different slug species.
Imaging work focused on the two main pestiferous slug species, Deroceras reticulatum (grey field slug) and Arion vulgaris (Spanish slug). Image data was gathered on individual slugs, multiple slugs, and against various background materials.

In addition, image data was gathered from glasshouse and real-life settings to help train the AI model, thus allowing improved accuracy. The more diverse the data, the better the model.

Phase two: Trialing slug mapping capabilities in glasshouse and field conditions.
During the project, SRC developed two surveying robot platforms, with the final platform having six cameras with lights and the ability to geolocate images.
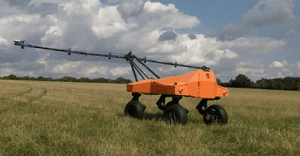
Initial trial work was conducted in the glasshouse at Rothamsted Research using the ‘Tom’ robot, gathering data and testing the AI model in various environmental conditions, including dark and light, wet and dry, varying soil types, different slug species and various crop types.

This was then rolled out into a real life setting on James Lee’s farm in Devon – testing ‘Tom’ the robot’s ability to take the images, uploading them to ‘Wilma’ where they were processed and identified. Edge AI was specially trained to identify slugs and immediately trigger the spray application. The AI data set continues to build –the more diverse the data is, the better the model.

Phase three: Developing precision spraying capabilities of the robot and trialing using a biological control agent
A 1 metre boom was developed, which was adapted from a conventional spraying system. The final iteration used in field trials could spray 20x20cm and was controlled by a microcontroller, with pressure regulated and flow measured and calibrated.


Conclusion:
This game-changing project has demonstrated that an autonomous slug monitoring system can be used to map slugs and for the precision application of bio-molluscicides. However, the AI model needs to be built upon with additional diverse data sets. The development of the monitoring and precision application capability within this project shows there is the potential to open up new markets for biological products within broadacre crops. Beyond this, there is also the opportunity to adapt the platform with new data sets to target a wide range of pests, diseases or weeds.
Thanks to:
CHAP’s contribution was led by malacologist and nematologist, Dr Jenna Ross OBE, alongside Dr Archita Barua, Dr Franklin Ilogu and Faye McDiarmid, who managed the slug breeding, imaging and trial work, James Godber on project management and Mark Larsen on financial management. The CHAP team worked extremely closely with Rothamsed Research scientist, Dr Tom Ashfield, who provided expertise in phenotyping and data analyses.
From SRC, the team included Pat Barretto who led on the project management, Andy Hall who was the technical lead, supported by Dan Rowe on robotics, Sam Herring on electronics, Nemo Scott Robinson and Michael Alcock on spraying technology, Tom Walters and Tom Watsham on AI engineering, and Rowan Duckworth, Tim Knott and Geoff Osmond who ran the data collected.
And last but by no means least, James Lee from AV & N Lee, who ensured the solution was fit for purpose. James also assisted on the deployment of field trials on his farm in Devon.
To instigate our next ground-breaking collaborative project, e-mail enquiries@chap-solutions.co.uk . You can also learn about our next ‘Bot’ project, SprayBot, on our news page here.